ロボット導入でコストダウン・生産性向上を実現するための

現場ですぐ役立つ!
エンジニアの研修に!
「九州生産技術セミナー」





従来技術と力センサの相違点を下記に示します。

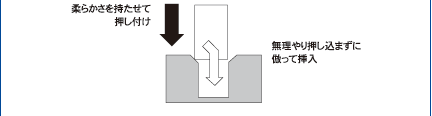
力制御によって、メカ的に柔らかさを持たせたツール(RCCデバイス)と同等の効果を実現します。

 |
 |
|
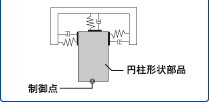
| ・制御点は、デバイス固定毎に固定 ・形状の異なるワーク毎に、個別の RCCデバイスが必要 ・垂直方向以外の向きで安定した柔 らかさを実現するのが困難 |
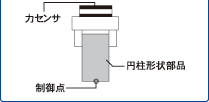
・制御点は任意のパラメータで設定 ・形状の異なるツールも個別のツー ルは不要。デバイスが必要 ・垂直方向だけでなく、任意の向きで 安定した柔らかさを実現 |
|
 |
 |

・高い耐過負荷性能を実現
・ロボットの手先にかかる外力(力とモーメント)を同時検出
・外力に対応する柔らかい動作を実現
・ロボットの手先にかかる外力(力とモーメント)を同時検出
・外力に対応する柔らかい動作を実現

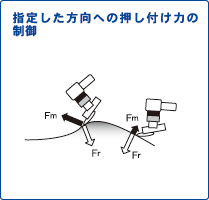
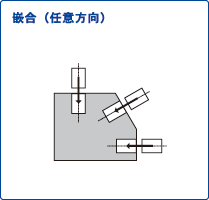
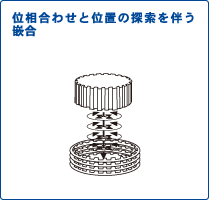
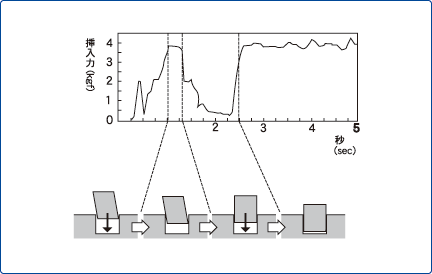
力センサにより、「指定した方向への押し付け力の制御」、「嵌合」、「位相合わせを伴う嵌合」、「位相合わせと位置の探索を伴う嵌合」が可能となります。
 |
 |
|
 |
 |
従来技術と力センサの相違点を下記に示します。
 |
 |