ロボット導入でコストダウン・生産性向上を実現するための

現場ですぐ役立つ!
エンジニアの研修に!
「九州生産技術セミナー」





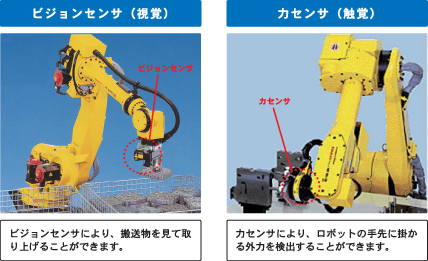
ここでいう知能ロボットとは、「ビジョンセンサ」と「力センサ」の両方を兼ね備えることで、 視覚情報・触覚情報をもち、自立的に動作するロボットをいいます。 ビジョンセンサにより搬送物を見て取り上げることができ、力センサによりロボットの手先にかかる外力を検出することができます。 |
||||
 |
||||
 |
||||
 |
||||
現場ですぐ役立つ!
エンジニアの研修に!
「九州生産技術セミナー」
ここでいう知能ロボットとは、「ビジョンセンサ」と「力センサ」の両方を兼ね備えることで、 視覚情報・触覚情報をもち、自立的に動作するロボットをいいます。 ビジョンセンサにより搬送物を見て取り上げることができ、力センサによりロボットの手先にかかる外力を検出することができます。 |
||||
|
||||
|
||||
|
||||