ロボット導入でコストダウン・生産性向上を実現するための

現場ですぐ役立つ!
エンジニアの研修に!
「九州生産技術セミナー」





ビジョンセンサを取り付けることによって視覚情報を取り入れることが可能となり、自立的にロボットを動かすことができるようになります。これにより、作業者の削減や長時間の無人連続運転などが可能となります。
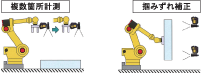
大きなワークの複数箇所を別々に撮像して計測結果を合成し、ワーク全体に対する2次元補正を精度良く行ないます。 |
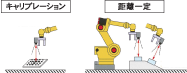
カメラに写ったワークの見た目の大きさを利用してワークの位置と高さを求めます。カメラ1台を使った簡単な構成で、デバイスタイジングなどを行なうことができます。 |
|||
 |
 |
|||
立体センサで対象物の2次元一姿勢を認識することができます。複数箇所計測や掴みずれ補正など、様々な応用が可能です。 |
コンベヤ上を流れる対象物の2次元位置と回転を認識し、各対象物に対してロボットをトラッキングさせることができます。複数ロボットへの適応的な負荷分配も可能です。
|
|||
 |
 |
|||
1箇所で行なったカメラキャリプレーションデータを用いて、異なる位置姿勢にある複数の検出対象に対する2次元補正を行なうことができます。 |
検出スコア、サイズ、明度、面積、長さなどのビジョン計測値を、ビジョンレジスタに出力することができます。それらをTPプログラム内参照し、判別処理などに利用できます。 |
|||
 |
 |
|||

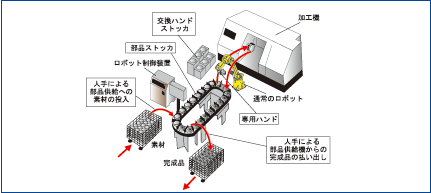
部品を加工機の加工台に取付け、加工後に取外しを行なう作業を、①ロボット未使用の場合、②センサなしのロボットによる自動化の場合、③知能ロボットによる自動化の場合の3パターンで下記にて比較します。
 |
|
| 部品を、人手で加工台に取り付け、取り外しを行う。 | |
 |
|
 |
|
| 部品を、人手で供給機に取り付け、取り外しを行う。(人間がロボットのために働く) | |
 |
|
 |
|
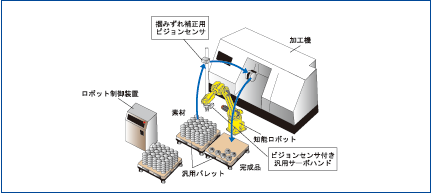
| 知能ロボットが、自立的に部品の取り付け、取り外しを実行する。 | |
 |
|
 |
|
 |
|
 |
|
知能ロボットを使用することで、周辺装置の削減、作業者の削減、長時間の無人化運転、段取り変え時間の短縮が可能となります。